Tele-Operation Rover Challenge
Tele-Operation is basically remote control. The mars rovers are tele-operated from Earth; several satellites are tele-operated for course/orbit corrections; even the drones flown in battle are tele-operated units. I have developed a straight forward demonstration of this tele-operation that is portable, and not nearly expensive as a drone.
Preparation
I started by remembering I had seen on the web various tiny cameras available. I have used r/c cars over the years and was struck by the idea of combining these two comonents together.

Prototype Kit
The result is a simple tele-operation kit. My original prototype was a camera, receiver, 12v tv, and an inexpensive r/c car.
The camera runs on 2.4 ghz which provides a clear, dependable signal. The prototype car ran on 27 mhz, which means distance is limited to line of sight – rather 500 to 1000 feet away. If there are obstructions, that’s ok if within the distance requirement. It’s not high powered, but keeping it close is better.
In initial trials, the experience of operating the 27 mhz car using only the image from the camera was challenging to say the least. The inexpensive car was designed for speed, not discrete control, and it was far too easy to end up caught in a corner.
On one such occasion, I stepped away from the monitor to determine what the car had run up against and found that the tall, long, huge gray wall in front of the car was … the curb of the sidewalk. The perspective of the camera on the car was very different than the typical view I had assumed of holding a similarity to driving a full size vehicle. This single aspect made learning to drive the car difficult because in addition to learning how to control it, I had to re-learn how to recognize common objects from the reduced perspective
As the trial progressed, I found that there was a marked limitation in range for the cars transceiver. I found that as the distance increased, even in line of sight, control diminished very quickly.
While the cost of the prototype was small ($40 for 2 cars, $40 for a single camera and transceiver, and $12 for B/W battery TV), I was able to successfully demonstrate Proof-of-Concept for off the shelf tele-operation.
Generation 2

Gen 2: 2.4 ghz car
During testing I realized a more robust car was needed, with an enhanced range of transceiver and more discrete control. Ultimately I settled on an (AMix) R/C car purchased at a local Hobby Town for $100. I acquired 2 vehicles. These cars were chosen because their controllers afforded far more discrete control over a far greater range. The extended range was accomplished because the car used 2.4 ghz.
The camera was retained from the prototype, and a second was acquired for the additional car. I upgraded to a 19″ flat tv with audio-video inputs to improve reception of the tv signal, and incorporate the sound output from the camera.
In testing, our new configuration, I made an error that proved embarrassing. Each of the individual components was briefly tested, R/C control/range, camera and monitor … separately. As such, integration tests were NOT performed and I discovered that the car’s generated interference in the tv signal rendering it unusable for our purposes.
Our First Event
Our first Tele-Operation Lunar Rover Challenge (TOLRC) event was intended to demonstrate the challenges of navigating the gray lunar landscape. To facilitate the simulation I placed three medium gray canvas tarps on the ground, and scattered beneath it a handful of plastic cups to simulate obstacles in the terrain.
The monitor was placed behind a trifold presentation board, and the operator was seated before the monitor and handed the controls. During our setup and preliminary testing, we discovered interference between the car’s controller and the TV transceiver.
Rather than accept defeat and cancel, we worked with the kids beside the track to practice the discrete control to go slowly, and stay ON the small “Moon”. They embraced the challenge with vigor and gradually were able to navigate smoothly about the terrain successfully.
The set up for the “Races” began by laying out the power cable and setting up the table to block the direct view of the young racers of the “Race Course”. The table had four “Class Room Stand Ups” with a coverlet to block the Sun from “washing out” the Monitors on the table. In front of the table I laid out a “Race Track” consisting of Tarps and plastic cups under the tarp to create obstacles for the Cars to be maneuvered around. As race time neared the first of three glitches occurred for the racing. One of our members with the second monitor did not show up, so I decided to go ahead and use only one car at a time and do solo racing. As I was doing the final set up for the racing we had our second glitch occur. I had the TV camera on the cars up and running with great pictures from the cars, with color and sound. Then as the first controller was turned on for the RC Car I discovered interference that had not experienced before. After troubleshooting the situation it was determined that the signal strength from the controllers were causing the interference. The amount of interference from the controllers varied from completely wiping out the picture to allowing some intelligent use of the set up.
It was decided to let the youth that had been waiting for the racing to begin to run the cars around the landscape and see how they liked driving the vehicles. In several cases the drivers were unable to stay on the track and had to return to the track in order to continue.
Although the glitches occurred, the youth had fun anyway and will most likely be back for our next event. We hope to have solved the interference problem by then and to have a successful day at the races.
Generation 3: Rover Styling
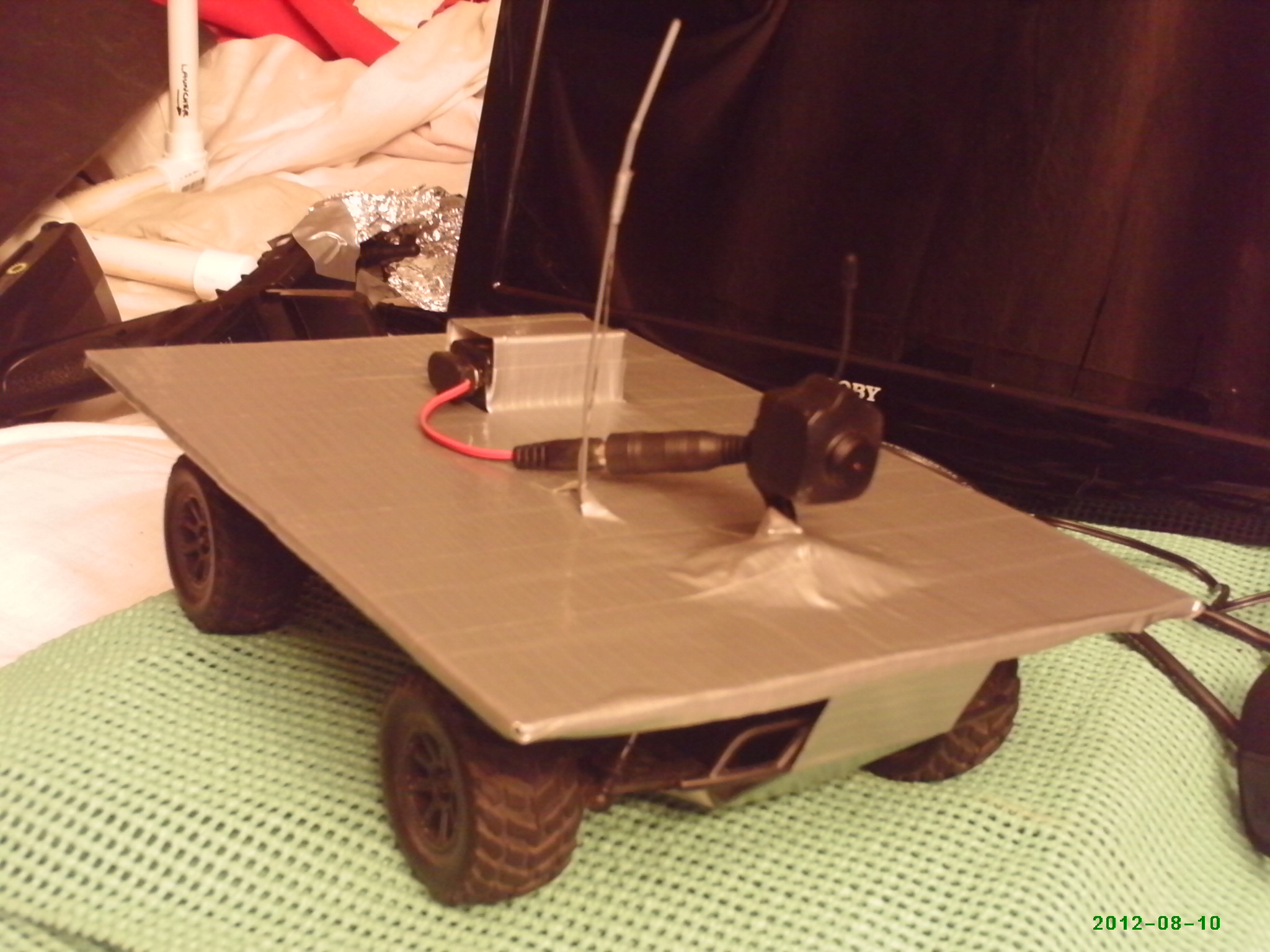
Rover Stylings
In Generation 3, I changed the appearance of the car, to more closely resemble the martian rovers. It was visually intriguing. When I got down to brass tacks and started testing, I discovered that using 2.4 ghz for both the car and the tv was problematic. The car’s stronger signal interfered with the tv signal.
The Future and Generation 4
The next generation will return to the 27/48 mhz cars, but gear them down for far more discrete control and slower speed. I am currently looking into ways to accomplish this for our next foray.